
 产品:12
产品:12

PWL A1/V2 系列气动箱体式执行机构--结构及动作原理
气动箱体式执行机构(简称箱体式)是以压缩空气为动力能源,接受气、电模拟信号或智能信号,输出角位移,并以一定的转矩推动被调节机构的一种角行程执行机构。针对不同的用户我公司开发出了 A1、V2 两种系列,其中 A 型机构***齐全,本系列执行机构可带多种功能,同时产品带保护罩壳,还可以有防爆要求,因此可以应用在比较恶劣的工况下。它可广泛应用于电力、化工、石油、冶金等部门。
本执行机构主要由机架、手操机构、气缸、输出轴、阀门定位器等五大部分构成 ( 见图 1),同时通过带各种附件来满足各种要求,
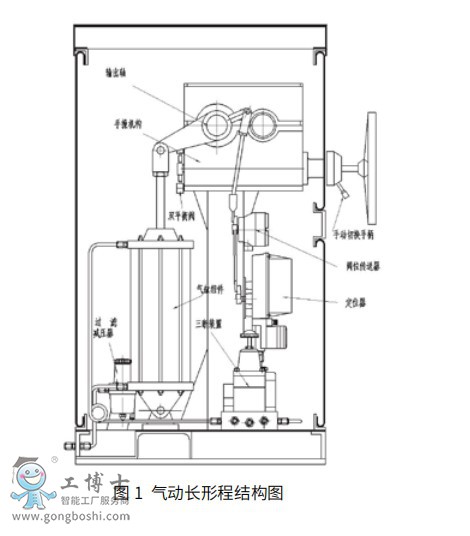
附件如下:阀位传送器、三断自锁装置(在断气源或电源或断电信号时,执行机构输出轴被锁在原来的位置上)、空气过滤压器、始终行程开关、电加热器等。同时可根据用户需要,对内部的各种附件可灵活的选用。
自动控制
当箱体式手操置于自动挡时,按要求接上气源
和电源和信号,箱体式处于自动控制状态。
图 2 为带定位器的箱体式工作原理,如图 2 中
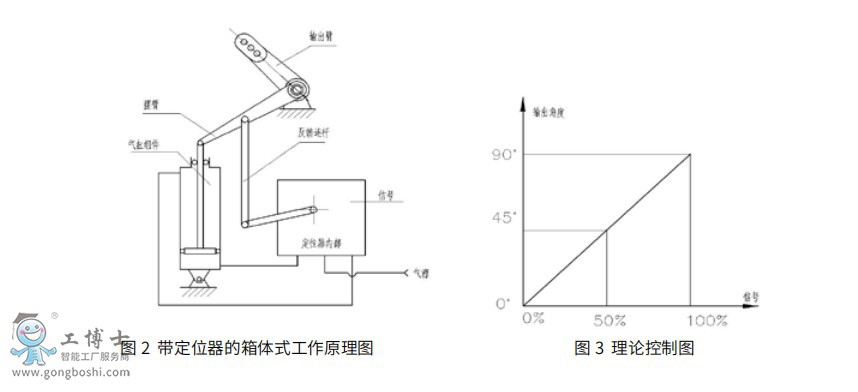
图 1 气动长形程结构图
图 2 带定位器的箱体式工作原理图 图 3 理论控制图所示,当定位器接受到信号时,定位器通过反馈连杆反馈来的角位移信号与输入信号进行比较,然后输出压力气推动活塞上行或下行,活塞杆推动摆臂转动,摆臂带动输出臂转动,从而使箱体式机构输出角位移。当反馈连杆反馈的信号与输入信号相同时(精度范围内),定位器停止供压力气,使机构保持在一定的输出位置。由原理可知箱体式机构的控制精度主要由定位器性能决定。箱体式输出转角与输入信号的理论控制线见图 3,理论控制图可知,输出的角度与输入信号成线性比例关系。
就地手操
当须人工调整或控制信号失效时,将箱体式手自动切换手柄置于手动档,外界输入信号将无效,转动手轮可方便的调节箱体式的输出摆臂。
手动机构结构原理图如图 4 所示,工作原理如下:先通过扳动切换手柄至手动档位置(此时内部的双平衡阀机构会自动隔离气源),偏心套随之转过一定的角度,使得蜗杆在高度方向提升了一段距离和蜗轮完全啮合,完成自动和手动的切换。转动手轮,蜗杆带动蜗轮旋转,蜗轮通过齿轮轴带动斜齿轮 2 转动,继而带动斜齿轮 1,再由斜齿轮 1 把力矩传送给输出轴完成对输出臂转角的改变。用户可根椐需要任意调整。换成自动只需把切换手柄扳至自动档即可。
三断自锁保护原理
a)、所谓三断自锁就是在工作气源中断、电网断电、断电信号时,要把执行机构位置保持在原来的位置上。本自锁装置采用气锁方式,即在自锁时将通往上下气缸的气路切断,使活塞不能动作,而达到自锁之目的。
b)、断气自锁原理:本自锁装置的基本部分是气动自锁阀,其工作原理如图 5 所示,当工作气源小于自锁阀设定的压力时,自锁阀的气阀关闭,气缸的气路与定位器的气路被切断,气缸的压力保持在闭锁前的状态,机构保持不动。当工作气源在于自锁阀开启压力时,气阀打开,机构正常工作。气动自锁阀的工作特性如图 6 所示。
手轮可设定开启压力。
- 下一篇:德国peckwomy派沃执行器|PWMOK 系列执行器产品分类
- 上一篇:暂无